ღეროში ვგულისხმობთ ცილინდრს П=0х[О, /], როცა ᲛᲔ" diamD. Აქ დ- ფართობი კოორდინატულ სიბრტყეზე Ox 2 x 3 (სურ. 62). ღეროს მასალა არის ერთგვაროვანი და იზოტროპული, ხოლო Ox ღერძი გადის მონაკვეთის სიმძიმის ცენტრში. დ.გარე მასის ძალების ველი f(r, ᲛᲔ)=/(X|, /)e, სადაც e არის Ox ღერძის ერთეული ვექტორი. ცილინდრის გვერდით ზედაპირზე გარე ზედაპირის ძალები ნულის ტოლი იყოს, ე.ი. რა= 0 ჩართულია dD X
შემდეგ (4.8)-დან გამომდინარეობს ამისთვის 1=0 თანასწორობა
საკუთარი ფორმები X კ(კ) მოსახერხებელია ნორმალიზება იმ სივრცის ნორმის გამოყენებით /^(), რომელსაც ეკუთვნის ფუნქცია v(s, I),ვინაიდან დროის ყოველ მომენტში კინეტიკური ენერგია ფუნქციონალური არსებობს და შეზღუდულია

სად ს- რეგიონის ტერიტორია დ.Ჩვენ გვაქვს

X*(s) = Jj- sin^-l სიჩქარის სივრცეში I 0 = ji)(s, /): v(s,ტ)ე

შედეგად, ვიღებთ ორთონორმალურ საფუძველს |l r *(^)| ,
სად ბ-მდე "- Kronecker სიმბოლო: ფუნქციები X k *(s), k= 1,2 არის ბუნებრივი ვიბრაციების ნორმალური რეჟიმები და ω*, k= 1, 2, ..., - სისტემის რხევების ბუნებრივი სიხშირეები თავისუფლების უსასრულო გრადუსით.
დასასრულს, ჩვენ აღვნიშნავთ, რომ ფუნქცია u(s, /) ეკუთვნის სისტემის კონფიგურაციის სივრცეს H, = (ვ(ს, ტ): ვ(ს, ტ) e e ^(), u(0, 1) = o(1, /) = 0), სადაც U^"OO, / ]) არის ფუნქციების სობოლევის სივრცე, რომელიც შეჯამებულია პირველი წარმოებულების კვადრატებთან ერთად ინტერვალზე. სივრცე I არის პოტენციური ენერგიის ფუნქციის განსაზღვრის დომენი. ელასტიური დეფორმაციები
და შეიცავს განსახილველი პრობლემის განზოგადებულ გადაწყვეტილებებს.
გრძივი ტალღები
განმარტება 1
ტალღა, რომელშიც ხდება რხევები მისი გავრცელების მიმართულებით. გრძივი ტალღის მაგალითია ხმის ტალღა.
სურათი 1. გრძივი ტალღა
მექანიკურ გრძივი ტალღებს ასევე უწოდებენ შეკუმშვის ტალღებს ან შეკუმშვის ტალღებს, რადგან ისინი წარმოქმნიან შეკუმშვას, როდესაც ისინი მოძრაობენ საშუალოზე. განივი მექანიკური ტალღები ასევე უწოდებენ "T- ტალღებს" ან "ათვლის ტალღებს".
გრძივი ტალღები მოიცავს აკუსტიკურ ტალღებს (ნაწილაკების სიჩქარე, რომლებიც მოძრაობენ ელასტიურ გარემოში) და სეისმურ P ტალღებს (მიმდინარეობს მიწისძვრებითა და აფეთქებებით). გრძივი ტალღების დროს საშუალო გადაადგილება ტალღის გავრცელების მიმართულების პარალელურია.
Ხმის ტალღები
გრძივი ჰარმონიული ხმის ტალღების შემთხვევაში, სიხშირე და ტალღის სიგრძე შეიძლება აღწერილი იყოს ფორმულით:
$y_0-$ რხევის ამპლიტუდა;\textit()
$\ომეგა -$ ტალღის კუთხოვანი სიხშირე;
$c-$ ტალღის სიჩქარე.
$\left((\rm f)\right)$ტალღის ჩვეულებრივი სიხშირე მოცემულია
ხმის გავრცელების სიჩქარე დამოკიდებულია საშუალების ტიპზე, ტემპერატურასა და შემადგენლობაზე, რომლითაც ის მოძრაობს.
ელასტიურ გარემოში ჰარმონიული გრძივი ტალღა მოძრაობს დადებითი მიმართულებით ღერძის გასწვრივ.
განივი ტალღები
განმარტება 2
განივი ტალღა- ტალღა, რომელშიც გარემოს ვიბრაციის მოლეკულების მიმართულება პერპენდიკულარულია გამრავლების მიმართულებაზე. განივი ტალღების მაგალითია ელექტრომაგნიტური ტალღა.

სურათი 2. გრძივი და განივი ტალღები
ტალღები აუზში და ტალღები სიმაზე ადვილად წარმოდგენილია განივი ტალღების სახით.

სურათი 3. სინათლის ტალღები განივი ტალღის მაგალითია
განივი ტალღები არის ტალღები, რომლებიც ირხევიან გავრცელების მიმართულების პერპენდიკულურად. არსებობს ორი დამოუკიდებელი მიმართულება, რომლებშიც შეიძლება მოხდეს ტალღის მოძრაობა.
განმარტება 3
ორგანზომილებიანი ათვლის ტალღები ამჟღავნებს ფენომენს ე.წ პოლარიზაცია.
ელექტრომაგნიტური ტალღები იგივენაირად იქცევიან, თუმცა მისი დანახვა ცოტა უფრო რთულია. ელექტრომაგნიტური ტალღები ასევე ორგანზომილებიანი განივი ტალღებია.
მაგალითი 1
დაამტკიცეთ, რომ სიბრტყეზე დაუცველი ტალღის განტოლება არის $(\rm y=Acos)\left(\omega t-\frac(2\pi)(\lambda)\right)x+(\varphi)_0$ ნაჩვენები ტალღისთვის ფიგურაში შეიძლება ჩაიწეროს $(\rm y=Asin)\left(\frac(2\pi )(\lambda )\right)x$. გადაამოწმეთ ეს $\ \ x$ კოორდინატთა მნიშვნელობების შეცვლით, რაც არის $\frac(\lambda)(4)$; $\frac(\lambda)(2)$; $\frac(0.75)(\lambda)$.
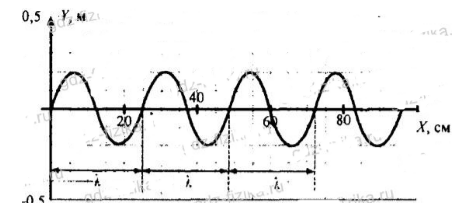
სურათი 4.
განტოლება $y\left(x\right)$ სიბრტყის დაუცველი ტალღისთვის არ არის დამოკიდებული $t$-ზე, რაც ნიშნავს, რომ $t$ დროის მომენტი შეიძლება აირჩეს თვითნებურად. მოდით ავირჩიოთ $t$ დროის მომენტი ისე, რომ
\[\omega t=\frac(3)(2)\pi -(\varphi)_0\] \
მოდით ჩავანაცვლოთ ეს მნიშვნელობა განტოლებაში:
\ \[=Acos\left(2\pi -\frac(\pi)(2)-\left(\frac(2\pi)(\lambda)\right)x\right)=Acos\left(2\ pi -\left(\left(\frac(2\pi)(\lambda)\right)x+\frac(\pi)(2)\right)\right)=\] \[=Acos\left(\მარცხნივ (\frac(2\pi)(\lambda)\right)x+\frac(\pi)(2)\right)=Asin\left(\frac(2\pi)(\lambda)\right)x\] \ \ \[(\mathbf x)(\mathbf =)\frac((\mathbf 3))((\mathbf 4))(\mathbf \lambda )(\mathbf =)(\mathbf 18),(\mathbf 75)(\mathbf \ სმ,\ \ \ )(\mathbf y)(\mathbf =\ )(\mathbf 0),(\mathbf 2)(\cdot)(\mathbf sin)\frac((\mathbf 3 ))((\mathbf 2))(\mathbf \pi )(\mathbf =-)(\mathbf 0),(\mathbf 2)\]
პასუხი: $Asin\left(\frac(2\pi)(\lambda)\მარჯვნივ)x$
განმარტება
გრძივი ტალღა– ეს არის ტალღა, რომლის გავრცელებისას გარემოს ნაწილაკები გადაადგილდებიან ტალღის გავრცელების მიმართულებით (ნახ. 1, ა).
გრძივი ტალღის მიზეზი არის შეკუმშვა/გაფართოება, ე.ი. საშუალო წინააღმდეგობა მისი მოცულობის ცვლილებების მიმართ. სითხეებში ან აირებში ასეთ დეფორმაციას თან ახლავს გარემოს ნაწილაკების იშვიათობა ან დატკეპნა. გრძივი ტალღები შეიძლება გავრცელდეს ნებისმიერ მედიაში - მყარი, თხევადი და აირისებრი.
გრძივი ტალღების მაგალითებია ტალღები ელასტიურ ღეროში ან ხმის ტალღები გაზებში.
განივი ტალღები
განმარტება
განივი ტალღა– ეს არის ტალღა, რომლის გავრცელებისას გარემოს ნაწილაკები გადაადგილდებიან ტალღის გავრცელების პერპენდიკულარული მიმართულებით (ნახ. 1, ბ).
განივი ტალღის მიზეზი არის საშუალო ერთი ფენის ათვლის დეფორმაცია მეორესთან შედარებით. როდესაც განივი ტალღა ვრცელდება საშუალოზე, იქმნება ქედები და ღარები. სითხეებსა და აირებს, მყარისგან განსხვავებით, არ აქვთ დრეკადობა ფენების ათვლის მიმართ, ე.ი. არ შეეწინააღმდეგოთ ფორმის შეცვლას. ამიტომ, განივი ტალღების გავრცელება შესაძლებელია მხოლოდ მყარ სხეულებში.
განივი ტალღების მაგალითებია ტალღები, რომლებიც მოძრაობენ გასწვრივ დაჭიმული თოკიან სიმის გასწვრივ.
სითხის ზედაპირზე ტალღები არც გრძივია და არც განივი. თუ წყალს გადააგდებთ წყლის ზედაპირზე, ხედავთ, რომ ის მოძრაობს, ტალღებზე ირხევა, წრიული ნიმუშით. ამრიგად, სითხის ზედაპირზე ტალღას აქვს როგორც განივი, ასევე გრძივი კომპონენტები. სითხის ზედაპირზე ასევე შეიძლება გამოჩნდეს სპეციალური ტიპის ტალღები - ე.წ ზედაპირული ტალღები. ისინი წარმოიქმნება ზედაპირული დაძაბულობის მოქმედებისა და ძალის შედეგად.
პრობლემის გადაჭრის მაგალითები
მაგალითი 1
| ვარჯიში | განსაზღვრეთ განივი ტალღის გავრცელების მიმართულება, თუ ათწილადს დროის გარკვეულ მომენტში აქვს ნახატზე მითითებული სიჩქარის მიმართულება. |
| გამოსავალი | მოდით დავხატოთ ნახატი. მოდით დავხატოთ ტალღის ზედაპირი ცურვის მახლობლად გარკვეული პერიოდის შემდეგ, იმის გათვალისწინებით, რომ ამ დროის განმავლობაში ცურავი ჩაიძირა, რადგან ის დროის მომენტში ქვევით იყო მიმართული. ვაგრძელებთ ხაზს მარჯვნივ და მარცხნივ, ჩვენ ვაჩვენებთ ტალღის პოზიციას დროს. ტალღის პოზიციის შედარების შემდეგ დროის საწყის მომენტში (მყარი ხაზი) და დროის მომენტში (ჩაწყვეტილი ხაზი), დავასკვნით, რომ ტალღა ვრცელდება მარცხნივ. |


განვიხილოთ სიგრძის ერთგვაროვანი ღერო, ანუ ცილინდრული ან სხვა ფორმის სხეული, რომელიც გასაჭიმად ან მოსახვევად უნდა გამოიყენოს. ეს უკანასკნელი გარემოება განასხვავებს ყველაზე თხელ ჯოხსაც კი სიმისგან, რომელიც, როგორც ვიცით, თავისუფლად იხრება.
ამ თავში ჩვენ გამოვიყენებთ მახასიათებლების მეთოდს ღეროს გრძივი ვიბრაციების შესასწავლად და შემოვიფარგლებით მხოლოდ ისეთი ვიბრაციების შესწავლით, რომლებშიც ღეროს ღერძის გასწვრივ მოძრავი ჯვარი სექციები ბრტყელი და პარალელურად რჩება. ერთმანეთს (სურ. 6). ასეთი ვარაუდი გამართლებულია, თუ ჯოხის განივი ზომები მცირეა მის სიგრძესთან შედარებით.

თუ ღერო ოდნავ დაიჭიმება ან შეკუმშულია გრძივი ღერძის გასწვრივ და შემდეგ თავისთვის დარჩა, მაშინ მასში წარმოიქმნება გრძივი ვიბრაციები. მივმართოთ ღერძი ღეროს ღერძის გასწვრივ და დავუშვათ, რომ მოსვენებულ მდგომარეობაში ღეროს ბოლოები არის წერტილებში. ავღნიშნოთ ამ მონაკვეთის გადაადგილებით დროის მომენტში, მაშინ მონაკვეთის გადაადგილება აბსცისით ტოლი იქნება
აქედან ირკვევა, რომ ღეროს ფარდობითი დაჭიმვა აბსცისის x მონაკვეთში გამოიხატება წარმოებულით.
ახლა თუ ვივარაუდებთ, რომ ღერო განიცდის მცირე რხევებს, ჩვენ შეგვიძლია გამოვთვალოთ დაძაბულობა ამ განყოფილებაში, მართლაც, ჰუკის კანონის გამოყენებით, მივხვდებით
სად არის ღეროს მასალის ელასტიურობის მოდული, მისი ფართობი რადიუსი. ავიღოთ დახურული ღერო ელემენტი
ორ მონაკვეთს შორის, რომელთა აბსციები, შესაბამისად, თანაბარია
და ასევე მიმართულია გასწვრივ. მეორე მხრივ, ელემენტის აჩქარება ტოლია, რის შედეგადაც შეგვიძლია დავწეროთ ტოლობა
![]()
სად არის ღეროს მოცულობითი სიმკვრივე. Აყენებს
და შემცირებით მივიღებთ ერთგვაროვანი ღეროს გრძივი ვიბრაციების დიფერენციალურ განტოლებას
![]()
ამ განტოლების ფორმა აჩვენებს, რომ ღეროს გრძივი ვიბრაციები ტალღური ხასიათისაა, ხოლო გრძივი ტალღების გავრცელების სიჩქარე a განისაზღვრება ფორმულით (4).
თუ ღეროზე ასევე მოქმედებს გარე ძალა, რომელიც გამოითვლება მისი მოცულობის ერთეულზე, მაშინ (3)-ის ნაცვლად ვიღებთ
![]()
ეს არის ღეროს იძულებითი გრძივი ვიბრაციის განტოლება. როგორც ზოგადად დინამიკაში, მხოლოდ მოძრაობის განტოლება (6) საკმარისი არ არის ღეროს მოძრაობის სრულად დასადგენად. აუცილებელია საწყისი პირობების დაყენება, ანუ ღეროს მონაკვეთების გადაადგილება და მათი სიჩქარე დროის საწყის მომენტში დაყენება.
სად და მითითებული ფუნქციებიინტერვალში (
გარდა ამისა, უნდა იყოს მითითებული სასაზღვრო პირობები ღეროს ბოლოებზე. Მაგალითად.
მექანიკა
UDC 531.01/534.112
ღეროების პაკეტის გრძივი ვიბრაციები
ᲕᲐᲠ. პავლოვი, ა.ნ. თემნოვი
MSTU im. ნ.ე. ბაუმანი, მოსკოვი, რუსეთის ფედერაციაელფოსტა: [ელფოსტა დაცულია]; [ელფოსტა დაცულია]
თხევადი საწვავი რაკეტების დინამიკის საკითხებში მნიშვნელოვან როლს ასრულებს რაკეტის მოძრაობის სტაბილურობის პრობლემა, როდესაც ხდება გრძივი ელასტიური რხევები. ასეთი რხევების გამოჩენამ შეიძლება გამოიწვიოს თვითრხევების დამყარება, რაც თუ რაკეტა გრძივი მიმართულებით არასტაბილურია, შეიძლება გამოიწვიოს მისი სწრაფი განადგურება. შეფუთვის რაკეტის გრძივი რხევების პრობლემა ფორმულირებულია გამოთვლის მოდელად. მიღებულია, რომ რაკეტების ტანკებში სითხე "გაყინულია", ე.ი. საკუთარი მოძრაობებისითხეები არ არის გათვალისწინებული. ჩამოყალიბებულია მთლიანი ენერგეტიკული ბალანსის კანონი განსახილველი პრობლემისთვის და მოცემულია მისი ოპერატორის ფორმულირება. მოცემულია რიცხვითი მაგალითი, რომლისთვისაც განისაზღვრება სიხშირეები, აგებულია და გაანალიზებულია ბუნებრივი რხევების ფორმები.
საკვანძო სიტყვები: გრძივი ვიბრაციები, ვიბრაციების სიხშირე და ფორმა, ღეროების პაკეტი, ჯამური ენერგეტიკული ბალანსის კანონი, თვითდაკავშირებული ოპერატორი, ვიბრაციების სპექტრი, POGO.
SYSTEM OF RODS გრძივი ვიბრაციები A.M. პავლოვი, ალ. თემნოვი
ბაუმანის მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტი, მოსკოვი, რუსეთის ფედერაცია ელ. [ელფოსტა დაცულია]; [ელფოსტა დაცულია]
თხევადი საწვავის რაკეტების დინამიკის საკითხებში ამ რაკეტის მოძრაობის მდგრადობის პრობლემას მნიშვნელოვანი როლი აქვს გრძივი ელასტიური ვიბრაციების გამოვლენისას. ასეთი სახის ვიბრაციების გაჩენამ შეიძლება გამოიწვიოს თვით-ვიბრაცია, რამაც შეიძლება გამოიწვიოს რაკეტის სწრაფი განადგურება გრძივი მიმართულებით რაკეტის არასტაბილურობის შემთხვევაში. თხევადი საწვავის რაკეტის გრძივი ვიბრაციების პრობლემა პაკეტის სქემის მიხედვით ყოფილაჩამოყალიბებულია პაკეტის ღეროების გამოყენებით, როგორც გამოთვლითი მოდელი. ვარაუდობენ, რომ რაკეტების ტანკებში სითხე „გაყინულია“, ე.ი. სითხის სათანადო მოძრაობები არ შედის. ამ პრობლემისთვის ჩამოყალიბდა ენერგიის დაზოგვის პრინციპი და მოცემულია მისი ოპერატორის დადგმა. არის რიცხვითი მაგალითი, რომლისთვისაც დადგინდა სიხშირეები, აშენდა და გაანალიზდა ეიგენის ვიბრაციის ფორმები.
საკვანძო სიტყვები: გრძივი ვიბრაციები, საკუთრივ რეჟიმები და სიხშირეები, ღეროების მოდელი, ენერგიის დაზოგვის პრინციპი, თვითდაკავშირებული ოპერატორი, ვიბრაციის სპექტრი, POGO.
შესავალი. ამჟამად, რუსეთში და მის ფარგლებს გარეთ, პაკეტების განლაგების გამშვები მანქანები იდენტური გვერდითი ბლოკებით, რომლებიც თანაბრად არის განაწილებული ცენტრალური ბლოკის გარშემო, ხშირად გამოიყენება ტვირთის საჭირო ორბიტაში გასაშვებად.
პაკეტის სტრუქტურების ვიბრაციების შესწავლა გარკვეულ სირთულეებს აწყდება გვერდითი და ცენტრალური ბლოკების დინამიურ ეფექტთან. გამშვები მანქანის განლაგების სიმეტრიის შემთხვევაში, პაკეტის დიზაინის ბლოკების რთული, სივრცითი ურთიერთქმედება შეიძლება დაიყოს ვიბრაციის ტიპების სასრულ რაოდენობად, რომელთაგან ერთ-ერთია ცენტრალური და გვერდითი ბლოკების გრძივი ვიბრაციები. გრძივი ვიბრაციების მათემატიკური მოდელი მსგავსი დიზაინითხელკედლიანი ღეროების შეფუთვის სახით ნაშრომში დეტალურადაა განხილული. ბრინჯი. 1. სქემა ცენტრალური- ამ სტატიაში წარმოდგენილია გრძივის თეორიული ღერო და გამოთვლითი შედეგები.
ღეროების პაკეტის ვიბრაცია, რომელიც ავსებს ა.ა.-ს მიერ ჩატარებულ კვლევას. სამწუხაროა.
პრობლემის ფორმულირება. განვიხილოთ ღეროების შეკვრის სხვა გრძივი ვიბრაციები, რომელიც შედგება l0 სიგრძის ცენტრალური ღეროსგან და იმავე სიგრძის N გვერდითი ღეროებისგან j = l, (l0 > lj), j = 1, 2,..., N, დამაგრებული. A წერტილში (xA = l) (ნახ. 1) ცენტრალური ზამბარის ელემენტებით სიმყარით k.
მოდით შემოვიტანოთ სტაციონარული საცნობარო ჩარჩო OX და დავუშვათ, რომ ღეროების სიმტკიცე EFj (x), განაწილებული მასა mj (x) და დარღვევა q (x,t) არის შეზღუდული ფუნქციები x კოორდინატები:
0 0 < mj < mj (x) < Mj; (1) 0 მოდით, გრძივი ვიბრაციების დროს წარმოიქმნება გადაადგილება Uj (x, t) ღეროების მონაკვეთებში კოორდინატი x, განტოლებებით განსაზღვრული. mj (x) ^ - ¿(eFj (x) ^ = qj (x,t), j = 0,1, 2,..., N, (2) ღეროების ბოლოებზე ნორმალური ძალების არარსებობის სასაზღვრო პირობები 3 =0, x = 0, ^ = 1, 2, 0, x = 0, x = l0; ღეროებში წარმოქმნილი ნორმალური ძალების თანაბარი პირობები, EF-3 = F x = l გაზაფხულის ელემენტების ელასტიური ძალები FпPJ = к (ш (ха) - у (¡,)); (4) EUodX (xa - 0) - EFodX (xa + 0) = , x = xa; ცენტრალური ღეროს xa წერტილში გადაადგილების თანაბარობის პირობა შჩ (ხა-ო) = შჩ (ხა+ო) და საწყისი პირობები შჩ y (x, 0) - შჩ (x); ,_ u(x, 0) = u(x), სადაც u(x, 0) = "d^1(x, 0). ჯამური ენერგეტიკული ბალანსის კანონი. გავამრავლოთ განტოლება (2) u(x,ξ)-ზე, გავაერთიანოთ თითოეული ღეროს სიგრძეზე და შევკრიბოთ შედეგები სასაზღვრო პირობების (3) და შესატყვისი პირობის (4) გამოყენებით. შედეგად ვიღებთ (( 1 ^ [ (diL 2 TZ (x) "BT" (x+ dt | 2 ^ J 3 w V dt N x „h 2 .. N „i. 1 ^ Г „„ , f dп3\ , 1 ^ Гj 1 N /* i dpl 2 1 N fl j EF3 dx +2^Уо И (x - -)(არა - Uj)2 dx = / ^ (x, £) მათ y (x, £) (x, (6) სადაც 8 (x - ¡y) არის დირაკის დელტა ფუნქცია. განტოლებაში (6), ხვეული ფრჩხილებში პირველი წევრი წარმოადგენს სისტემის კინეტიკურ ენერგიას T (¿), მეორე არის პოტენციური ენერგია Pr (£), რომელიც გამოწვეულია ღეროების დეფორმაციით, ხოლო მესამე არის პოტენციური ენერგია. ზამბარის ელემენტების Pk (£), რომელიც ელასტიური დეფორმაციის არსებობის შემთხვევაში შეიძლება დაიწეროს სახით Pk (*) = 2 £ / Cy (¡y) 8 (x - ¡1) E^ (¡y) (ddit (¡1)) 2 (x, Cy = Eu. განტოლება (6) გვიჩვენებს, რომ განსახილველი მექანიკური სისტემის დროში მთლიანი ენერგიის ცვლილება უდრის სიმძლავრის გარე გავლენა. გარე აშლილობის არარსებობის შემთხვევაში, q (x,t), ვიღებთ მთლიანი ენერგიის შენარჩუნების კანონს: T (t) + Pr (t) + Pk (t) = T (0) + Pr (0) + Pk (0). კინემატოგრაფია. ენერგეტიკული ბალანსის კანონი აჩვენებს, რომ ნებისმიერ დროს t ფუნქციები Uj (x, t) შეიძლება ჩაითვალოს ჰილბერტის სივრცის ელემენტებად L2j(; m3 (x)), რომელიც განისაზღვრება ¡i სიგრძეზე სკალარული ნამრავლით. (us,Vk)j = J mj (x) usVkdx 0 და შესაბამისი ნორმა. შემოვიღოთ ჰილბერტის სივრცე H ტოლი ორთოგონალური ჯამის L2j, H = L20 Ф L21 Ф... Ф L2N, ვექტორული ფუნქცია U = (uo, Ui,..., uN)т და ოპერატორი A, რომელიც მოქმედებს სივრცე H მიმართების მიხედვით AU = დიაგნოსტიკა (A00U0, A11U1,..., Annun). mj(x)dx\jdx" ოპერატორები განსაზღვრულია კომპლექტი B (A33) С Н ფუნქციების, რომლებიც აკმაყოფილებს (3) და (4) პირობებს. თავდაპირველი ამოცანა (1)-(5) საწყის პირობებთან ერთად ჩაიწერება ფორმაში Au = f (*), u (0) = u0, 17(0) = u1, (7) სადაც f (*) = ((*),51 (*),..., Yam (¿))t. ლემა. 1. თუ პირველი ორი პირობა (1) დაკმაყოფილებულია, მაშინ ოპერატორი A ევოლუციის ამოცანაში (7) არის შეუზღუდავი, თვითშეკავშირებული, დადებითი განსაზღვრული ოპერატორი H სივრცეში. (Au,K)n = (u,AK)n, (Au, u)i > c2 (i, u)i. 2. ოპერატორი A წარმოქმნის ენერგეტიკულ სივრცეს NA ნორმის ტოლი ღეროების პაკეტის რხევების პოტენციური ენერგიის ორჯერ მეტის ტოლი. 3\^I h)2 = 2П > 0. (8) IIUIIA = £/ EF^^J dx + k £ (uo - U)2 = 2П > 0. < Оператор А неограничен в пространстве Н, поскольку неограничен каждый диагональный элемент А33. Самосопряженность и положительная определенность оператора А проверяются непосредственно: (AU, v)h =/m (x) (-^| (EFo (x) ^j) Vo (x) dx+ +£ jm(x) (- jx) | (ef- (x) dndxa))v-(x) dx=... = EFo (x) uo (x) vo (x) dx - EFo (x) U) (x) vo (x) J EFo (x) uo (x) vo (x) dx - EFo (x) uo (x) ?o (x) + ^^ / EF- (x) u- (x) vo (x) dx - ^^ EF- (x) u- (x) v- (x) J EFo (x) uo (x) v" (x) dx - EFo (xa - 0) uo (xa - 0) vo (xa) + 0 EFo (xa + 0) uo (xa + 0) vo (xa) - £ EF- (/-) u- (/-) v- (/-) + J EF- (x) u- (x) v- (x) dx = J EFo (x) uo (x) vo (x) dx+ -=100 + £ / EF.,- (x) u- (x) g?- (x) dx+ o O(xa)- £ EF- (/-) u- (/-) v?"- (/-) = EFo (x) uo (x) v?"o (x) dx+ -=10 + £ / EF- (x) u- (x) v- (x) dx+ -=1 0 - + £ k (uo (xa) - u- (/-)) (vo (xa) - v- (/-)) = (U, A?)H (AU, U)H = ... = I EF0 (x) u"2 (x) dx - EF0 (x) u0 (x) u0 (x) J EF0 (x) u"0 (x) dx - EF0 (x) u0 (x) u0 (x) + ^^ / EFj (x) u"2 (x) dx - ^^ EFj (x) uj (x) u3 (x) "J EF°(x) u"2 (x) dx 4EF0 (x) u"2 (x) dx+£ JEFj (x) u"2 (x) dx У^ k (u0 (l) uj (l) - u2 (/)) + u0 (l) ^ k (u0 (l) - uj (l)) = EF0 (x) u"2 (x) dx + / EF0 (x) u"0 (x) dx + S / EFj (x) u"2 (x) dx + k ^ (u0 (l) - uj (l))2 > c2 (U, U)H ზემოაღნიშნული შედეგებიდან გამომდინარეობს, რომ A ოპერატორის ენერგეტიკული ნორმა გამოიხატება ფორმულით (8). ევოლუციური პრობლემის გადაჭრა. ჩამოვაყალიბოთ შემდეგი თეორემა. თეორემა 1. პირობები დაკმაყოფილდეს U0 £ D (A1/2), U0 £ H, f (t) £ C (; H), მაშინ ამოცანა (7) აქვს უნიკალური სუსტი ამონახსნი U (t) ფორმულით განსაზღვრულ ინტერვალზე U (t) = U0 cos (tA1/2) +U1 sin (tA1/2) +/sin ((t - s) A1/2) A-1/2f (s) ds. 5 გარეგანი აშლილობის არარსებობისას f (£), ენერგიის შენარჩუნების კანონი დაკმაყოფილებულია 1 II A 1/2UИ2 = 1 1 II A1/2U 0|H. < Эволюционная задача (7) - это стандартная задача Коши для дифференциального операторного уравнения гиперболического типа, для которого выполнены все условия теоремы о разрешимости . წნელების პაკეტის ბუნებრივი ვიბრაციები. დავუშვათ, რომ ღეროების სისტემაზე გავლენას არ ახდენს გარე ძალების ველი: f (t) = 0. ამ შემთხვევაში, ღეროების მოძრაობებს დაერქმევა თავისუფალი. ღეროების თავისუფალ მოძრაობას, t დროის მიხედვით, კანონის exp (iwt) მიხედვით, ბუნებრივ ვიბრაციას უწოდებენ. თუ ავიღებთ U (x, t) = U (x) eiWÍ განტოლებაში (7), მივიღებთ სპექტრულ ამოცანას A ოპერატორისთვის: AU - AEU = 0, L = w2. (9) A ოპერატორის თვისებები საშუალებას გვაძლევს ჩამოვაყალიბოთ თეორემა საკუთარი ფუნქციების სპექტრისა და თვისებების შესახებ. თეორემა 2. სპექტრული ამოცანა (9) ღეროების შეკვრის ბუნებრივი ვიბრაციების შესახებ აქვს დისკრეტული დადებითი სპექტრი 0 < Ai < Л2 < ... < Ak < ..., Ak ^ то და საკუთრივ ფუნქციების სისტემა (Uk (x))^=0, სრული და ორთოგონალური H და HA სივრცეებში და დაკმაყოფილებულია შემდეგი ორთოგონალურობის ფორმულები: (Ufe, Us)H = £ m (xj UfejMSjdx = j=0 0 (გრ= £/T^) d*+ K (“feo - Mfej) (uso -) = Afeífes. j=i სპექტრული ამოცანის შესწავლა ღეროების ერთგვაროვანი შეკვრის შემთხვევაში. გადაადგილების ფუნქცია m- (x, £) სახით m- (x, £) = m- (x) წარმოდგენის შემდეგ, ცვლადების გამოყოფის შემდეგ ვიღებთ სპექტრულ ამოცანებს თითოეული ღეროსთვის: ^Oi + Lm = 0, ^ = 0,1,2,..., N (10) რომელსაც მატრიცის სახით ვწერთ 4 £ + Li = 0, A = -,-,-,...,- \ t0 t1 t2 t « u = (u0, u1, u2,..., u«)t. მიღებული შედეგების ამოხსნა და ანალიზი. ცენტრალური ღეროს გადაადგილების ფუნქციები განყოფილებაში ავღნიშნოთ, როგორც u01, ხოლო განყოფილებაში, როგორც u02 (g). ამ შემთხვევაში, u02 ფუნქციისთვის კოორდინატების საწყისს გადავიტანთ წერტილში კოორდინატით /. თითოეული ღეროსთვის წარმოგიდგენთ (10) განტოლების ამოხსნას სახით უცნობი მუდმივების საპოვნელად (11), ვიყენებთ ზემოთ ჩამოყალიბებულ სასაზღვრო პირობებს. ერთგვაროვანი სასაზღვრო პირობებიდან შესაძლებელია გარკვეული მუდმივების დადგენა, კერძოდ: C02 = C12 = C22 = C32 = C42 = ... = CN 2 = 0. შედეგად, რჩება N + 3 მუდმივების პოვნა: C01, C03, C04, C11, C21, C31, C41,..., CN1. ამისათვის ჩვენ ვხსნით N + 3 განტოლებას N + 3 უცნობისთვის. მივიღოთ მიღებული სისტემა მატრიცის სახით: (A) (C) = (0) . აქ (C) = (C01, C03, C04, C11, C21, C31, C41,..., Cn 1)t არის უცნობის ვექტორი; (A) - დამახასიათებელი მატრიცა, cos (A1) EF0 A sin (A1) + L sin (L (Zo - 1)) L cos (L (Zo - 1)) 0 00 0 \ -1 0 0000 0 y 00 00 0 000 წ ა = კ სოე ^ ^A-L^ ; in = -k co8((.40-01L)1/2 ^ ; 7 = (A4"-1 ლ) 1/2 ap ((A"1l) 1/2 + k sov ((A"1l) 1/2; (~ \ 1/2 ~ Л= ^Л] ; A--: 3 = 0. არატრივიალური ამოხსნის მოსაძებნად, ცვლადად ვიღებთ მუდმივ C01 € M-ს, გვაქვს ორი ვარიანტი: C01 = 0; C01 = 0. მოდით C01 = 0, შემდეგ C03 = C04 = 0. ამ შემთხვევაში, არატრივიალური ამონახსნის მიღება შეიძლება, თუ 7 = 0 (12)-დან, როდესაც დამატებითი პირობა დაკმაყოფილებულია. £ s-1 = 0, (13) რომელიც შეიძლება მივიღოთ სისტემის მესამე განტოლებიდან (12). შედეგად, ჩვენ ვიღებთ მარტივ სიხშირის განტოლებას EP (A"1 L)1/2 W ((A"1^1/2 P + ზზ \V ზზ K cos ^ (A-/a) 1/2 ^ = 0, j G, ემთხვევა სიხშირის განტოლებას ერთ ბოლოზე დრეკად დამაგრებული ღეროსთვის, რომელიც შეიძლება ჩაითვალოს პირველ ნაწილობრივ სისტემად. ამ შემთხვევაში, გვერდითი ღეროების მოძრაობის ყველა შესაძლო კომბინაცია, რომელიც აკმაყოფილებს პირობას (13) შეიძლება პირობითად დაიყოს ჯგუფებად, რომლებიც შეესაბამება ფაზის სხვადასხვა კომბინაციებს (განხილულ შემთხვევაში, ფაზა განისაზღვრება C.d ნიშნით). თუ ვივარაუდებთ, რომ გვერდითი ღეროები იდენტურია, მაშინ გვაქვს ორი ვარიანტი: 1) Сд = 0, მაშინ ასეთი კომბინაციების რაოდენობა n სხვადასხვა N-ისთვის შეიძლება გამოითვალოს ფორმულის გამოყენებით n = N 2, სადაც არის გაყოფის ფუნქცია ნაშთების გარეშე; 2) ნებისმიერი (ან ნებისმიერი) მუდმივი C- ტოლია 0-ის, მაშინ შესაძლო კომბინაციების რაოდენობა იზრდება და შეიძლება განისაზღვროს ფორმულით £ [(N - m) div 2]. მოდით Coi = 0, შემდეგ Cn = C21 = C31 = C41 = ... = CN1 = = C01 (-v/t), სადაც in და y არის კომპლექსები, რომლებიც შედის (12). სისტემიდან (12) ასევე გვაქვს: C03 = C01 cos (А/); C04=C03 tg (L (/0 - /)) = C01 cos (A/) x x tg (L (/0 - /)), ე.ი. ყველა მუდმივი გამოხატულია C01-ით. სიხშირის განტოლება იღებს ფორმას EFo U-o1 L tg A-1 L) " (lo - l)) - K2 cos | í a!-,1 ლ მაგალითად, განვიხილოთ სისტემა ოთხი გვერდითი ზოლით. ზემოთ აღწერილი მეთოდის გარდა, ამ მაგალითისთვის, თქვენ შეგიძლიათ ჩაწეროთ სიხშირის განტოლება მთელი სისტემისთვის A მატრიცის განმსაზღვრელი გამოთვლებით და ნულის ტოლფასი. მოდით შევხედოთ მას Y4 (L sin (L (/o - /)) cos (L/) EFoЛ+ L cos (L (/o - /)) (EFoЛ sin (L/) + 4v)) - 4av3L cos (L(/0 - /)) = 0. ტრანსცენდენტული სიხშირის განტოლებების გრაფიკები ზემოთ განხილული შემთხვევებისთვის წარმოდგენილია ნახ. 2. საწყისი მონაცემები იქნა მიღებული: EF = 2,109 N; EF0 = 2.2 109 N; k = 7 107 ნ/მ; მ = 5900 კგ/მ; mo = 6000 კგ/მ; / = 23; /о = 33 მ განხილული მიკროსქემის რხევის პირველი სამი სიხშირის მნიშვნელობები მოცემულია ქვემოთ: n................................ და მიხარია................................. 1 2 3 20,08 31,53 63,50 ბრინჯი. 2. ტრანსცენდენტული სიხშირის განტოლებების გრაფიკები Coi = 0 (i) და Coi = 0 (2) წარმოვადგინოთ მიღებული ხსნარების შესაბამისი ვიბრაციის რეჟიმები (ზოგადად ვიბრაციის რეჟიმები არ არის ნორმალიზებული). პირველი, მეორე, მესამე, მეოთხე, 13 და 14 სიხშირის შესაბამისი ვიბრაციის ფორმები ნაჩვენებია ნახ. 3. პირველი ვიბრაციის სიხშირეზე გვერდითი ღეროები ერთი და იგივე ფორმის ვიბრირებენ, მაგრამ წყვილებში ანტიფაზაში. ნახ.3. გვერდითი (1) და ცენტრალური (2) ღეროების ვიბრაციის ფორმები, რომლებიც შეესაბამება პირველ V = 3.20 Hz (a), მეორე V = 5.02 Hz (b), მესამე V = 10.11 Hz (c), მეოთხე. V = 13,60 Hz (d), მე -13 V = 45,90 Hz (d) და მე -14 V = 50,88 Hz (f) სიხშირეები (ნახ. 3, ა), მეორესთან ერთად, ცენტრალური ღერო რხევა, გვერდითი კი ფაზაში ერთნაირი ფორმით ირხევა (ნახ. 3, ბ). უნდა აღინიშნოს, რომ განსახილველი ღეროების სისტემის პირველი და მეორე ვიბრაციის სიხშირე შეესაბამება მყარი სხეულებისგან შემდგარი სისტემის ვიბრაციას. როდესაც სისტემა რხევა მესამე ბუნებრივი სიხშირით, პირველად ჩნდება კვანძები (ნახ. 3c). მესამე და შემდგომი სიხშირეები (ნახ. 3d) შეესაბამება სისტემის ელასტიურ ვიბრაციას. ვიბრაციების სიხშირის მატებასთან ერთად, რომელიც დაკავშირებულია ელასტიური ელემენტების გავლენის შემცირებასთან, ვიბრაციების სიხშირეები და ფორმები მიდრეკილია ნაწილობრივი (ნახ. 3, ე, ვ). ფუნქციების მრუდები, რომელთა გადაკვეთის წერტილები აბსცისის ღერძთან არის ტრანსცენდენტული განტოლებების ამონახსნები, წარმოდგენილია ნახ. 4. ნახაზის მიხედვით სისტემის რხევების ბუნებრივი სიხშირეები განლაგებულია ნაწილობრივ სიხშირეებთან ახლოს. როგორც ზემოთ აღინიშნა, სიხშირის მატებასთან ერთად, იზრდება ბუნებრივი სიხშირეების კონვერგენცია ნაწილობრივთან. შედეგად, სიხშირეები, რომლებზეც რხევა მთელი სისტემა, პირობითად იყოფა ორ ჯგუფად: გვერდითი ღეროს ნაწილობრივ სიხშირეებთან ახლოს და ცენტრალური ღეროს ნაწილობრივ სიხშირეებთან ახლოს. დასკვნები. განხილულია ღეროების პაკეტის გრძივი ვიბრაციის პრობლემა. აღწერილია დასმული სასაზღვრო პრობლემის თვისებები და მისი საკუთრივ მნიშვნელობების სპექტრი. შემოთავაზებულია სპექტრული პრობლემის გადაწყვეტა ერთგვაროვანი გვერდითი ღეროების თვითნებური რაოდენობისთვის. რიცხვითი მაგალითისთვის, ნაპოვნია პირველი რხევის სიხშირეების მნიშვნელობები და აგებულია შესაბამისი ფორმები. ასევე გამოვლინდა აგებული ვიბრაციის რეჟიმების ზოგიერთი დამახასიათებელი თვისება. ბრინჯი. 4. ფუნქციების მრუდები, რომელთა გადაკვეთის წერტილები აბსცისის ღერძთან არის ტრანსცენდენტული განტოლებების ამონახსნები, რადგან CoX = 0 (1), Cox = 0 (2) ემთხვევა პირველ ნაწილობრივ სისტემას (გვერდითი ღერო დამაგრებულია დრეკადზე. ელემენტი x = I წერტილში) და მეორე ნაწილობრივი სისტემა (5) (ცენტრალური ღერო დამაგრებულია ოთხ ელასტიურ ელემენტზე A წერტილში) ლიტერატურა 1. კოლესნიკოვი კ.ს. რაკეტების დინამიკა. მ.: მექანიკა, 2003. 520 გვ. 2. ბალისტიკური რაკეტები და გამშვები მანქანები / O.M. ალიფანოვი, ა.ნ. ანდრეევი, ვ.ნ. გუშჩინი და სხვ.: Bustard, 2004. 511 გვ. 3. რაბინოვიჩ ბ.ი. შესავალი კოსმოსური ხომალდის გამშვები მანქანების დინამიკაში. მ.: მექანიკა, 1974. 396 გვ. 4. თხევადი რაკეტების POGO სტაბილურობის პარამეტრის კვლევა / Z. Zhao, G. Ren, Z. Yu, B. Tang, Q. Zhang // კოსმოსური ხომალდის და რაკეტების J.. 2011. ტ. 48. არის. 3. გვ 537-541. 5. ბალაკირევი იუ.გ. თხევადმავალი გამშვები მანქანების გრძივი ვიბრაციების ანალიზის მეთოდები // კოსმონავტიკა და სარაკეტო მეცნიერება. 1995. No 5. გვ 50-58. 6. ბალაკირევი იუ.გ. სერიული მოწყობის თხევადი რაკეტის მათემატიკური მოდელის მახასიათებლები, როგორც საკონტროლო ობიექტი // თანამედროვე მექანიკური ინჟინერიის სიძლიერის შერჩეული პრობლემები. 2008. გვ 43-55. 7. დოკუჩაევი ლ.ვ. პაკეტის გამშვები მანქანის დინამიკის შესწავლის მეთოდების გაუმჯობესება მათი სიმეტრიის გათვალისწინებით // კოსმონავტიკა და სარაკეტო მეცნიერება. 2005. No 2. გვ 112-121. 8. პოჟალოსტინი ა.ა. სითხით დრეკადი ჭურვების ბუნებრივი და იძულებითი ვიბრაციების გამოთვლის სავარაუდო ანალიტიკური მეთოდების შემუშავება: დის. ...Dr.Tech. მეცნიერ. მ., 2005. 220 გვ. 9. ამწე ს.გ. ხაზოვანი დიფერენციალური განტოლებებიბანახის სივრცეებში. მ.: ნაუკა, 1967. 464 გვ. 10. კოპაჩევსკი ი.დ. მათემატიკური ფიზიკის ოპერატორის მეთოდები. სიმფეროპოლი: შპს "ფორმა", 2008. 140 გვ. კოლესნიკოვი კ.ს. დინამიკა რაკეტი. მოსკოვი, Mashinostroenie Publ., 2003. 520 გვ. ალიფანოვი O.N., Andreev A.N., Gushchin V.N., eds. ბალისტიჩესკიე რაკიტი და რაკიტი-ნოსითელი. მოსკოვი, დროფა გამოცემა, 2003. 511 გვ. რაბინოვიჩ ბ.ი. ვვედენიე ვ დინამიკუ რაკეტ-ნოსითლეი კოსმიჩესკიხ აპარატოვ. მოსკოვი, Mashinostroenie Publ., 1974. 396 გვ. Zhao Z., Ren G., Yu Z., Tang B., Zhang Q. პარამეტრის კვლევა თხევადი საწვავის რაკეტის POGO სტაბილურობის შესახებ. J. Spacecraft and Rockets, 2011, ტ. 48, ის. 3, გვ. 537-541 წწ. ბალაკირევი იუ.გ. თხევადი საწვავის ძრავით გამშვები მანქანების გრძივი ვიბრაციების ანალიზის მეთოდები. კოსმ. i raketostr. , 1995, No. 5, გვ. 50-58 (რუს.). ბალაკირევი იუ.გ. Osobennosti matematicheskoy modeli zhidkostnoy rakety paketnoy komponovki kak ob"ekta upravlenii. Sb. "Izbrannye problemy prochnosti sovremennogo mashinostroeniya". მოსკოვი, Fizmatlit Publ., 2008. 204 გვ. (ციტირებული გვ.355). დოკუჩაევი ლ.ვ. კლასტერული გამშვები მანქანების დინამიკის შესწავლის მეთოდების გაუმჯობესება მათი სიმეტრიის გათვალისწინებით. კოსმ. i raketostr. , 2005, No. 2, გვ. 112-121 (რუს.). პოჟალოსტინი ა.ა. Razrabotka priblizhennykh analiticheskikh metodov rascheta sobstvennykh i vynuzhdennykh kolebaniy uprugikh obolochek s zhidkost"yu. დისს. დოქტ. ტეხნი. ნაუკ . კრეინ ს.გ. Lineynye differentsial"nye uravneniya v Banakhovykh prostranstvakh. Moscow, Nauka Publ., 1967. 464 p. Kopachevskiy I.D. Operatornye metody matematicheskoy fiziki. Simferopol", Forma Publ., 2008. 140 გვ. სტატია რედაქტორმა მიიღო 2014 წლის 28 აპრილს პავლოვი არსენი მიხაილოვიჩი - MSTU-ს კოსმოსური ხომალდების და გამშვები მანქანების განყოფილების სტუდენტი. ნ.ე. ბაუმანი. სპეციალიზირებულია სარაკეტო და კოსმოსური ტექნოლოგიების სფეროში. MSTU im. ნ.ე. ბაუმაში, რუსეთის ფედერაცია, 105005, მოსკოვი, მე-2 ბაუმანსკაიას ქ., 5. პავლოვი ა.მ. - ბაუმანის მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტის "კოსმოსური ხომალდების და გამშვები მანქანების" ფაკულტეტის სტუდენტი. სპეციალისტი სარაკეტო და კოსმოსური ტექნოლოგიების დარგში. ბაუმანის მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტი, ბაუმანსკაიას ქ. 5, მოსკოვი, 105005 რუსეთის ფედერაცია. თემნოვი ალექსანდრე ნიკოლაევიჩი - დოქ. ფიზიკა და მათემატიკა მეცნიერებათა, მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტის კოსმოსური ხომალდებისა და გამშვები მანქანების დეპარტამენტის ასოცირებული პროფესორი. ნ.ე. ბაუმანი. ავტორი 20 წელზე მეტი სამეცნიერო ნაშრომებისითხისა და აირის მექანიკის და რაკეტისა და კოსმოსური ტექნოლოგიების დარგში. MSTU im. ნ.ე. ბაუმაში, რუსეთის ფედერაცია, 105005, მოსკოვი, მე-2 ბაუმანსკაიას ქ., 5. თემნოვი ა.ნ. -კანდი. მეცნიერ. (ფიზ.-მათ.), ასოც. ბაუმანის მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტის "კოსმოსური ხომალდების და გამშვები მანქანების" განყოფილების პროფესორი. 20-ზე მეტი პუბლიკაციის ავტორი სითხისა და აირის მექანიკისა და სარაკეტო-კოსმოსური ტექნოლოგიების სფეროში. ბაუმანის მოსკოვის სახელმწიფო ტექნიკური უნივერსიტეტი, ბაუმანსკაიას ქ. 5, მოსკოვი, 105005 რუსეთის ფედერაცია.